What are the disadvantages of F-A-R designs?
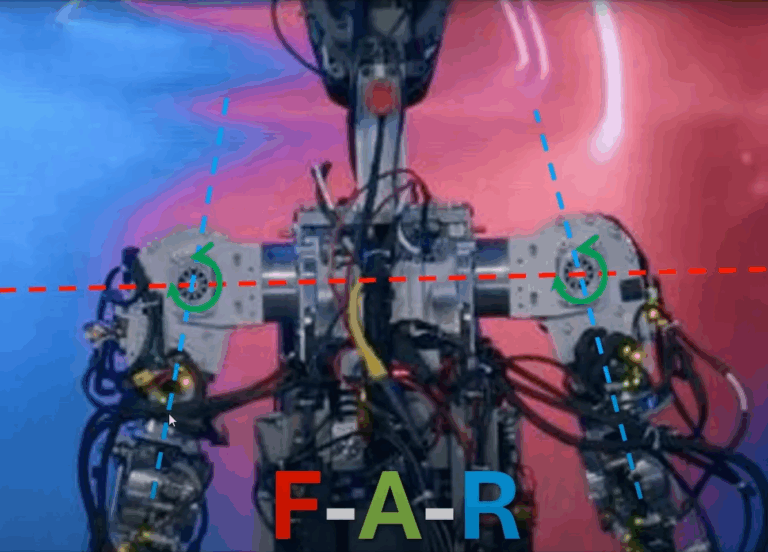
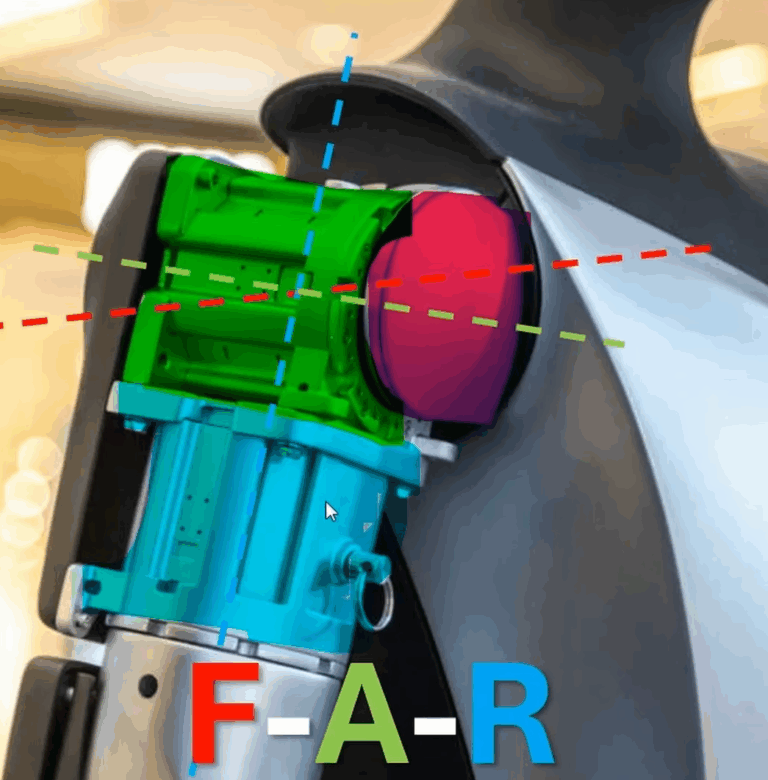
1. When the middle axis approaches 90°, the first and third axes align. That means at 90 degree abduction, you can get ill-conditioned jacobians, huge joint velocities, or abrupt flip in command angles. No controller can remove a mechanism singularity—it can only steer around it
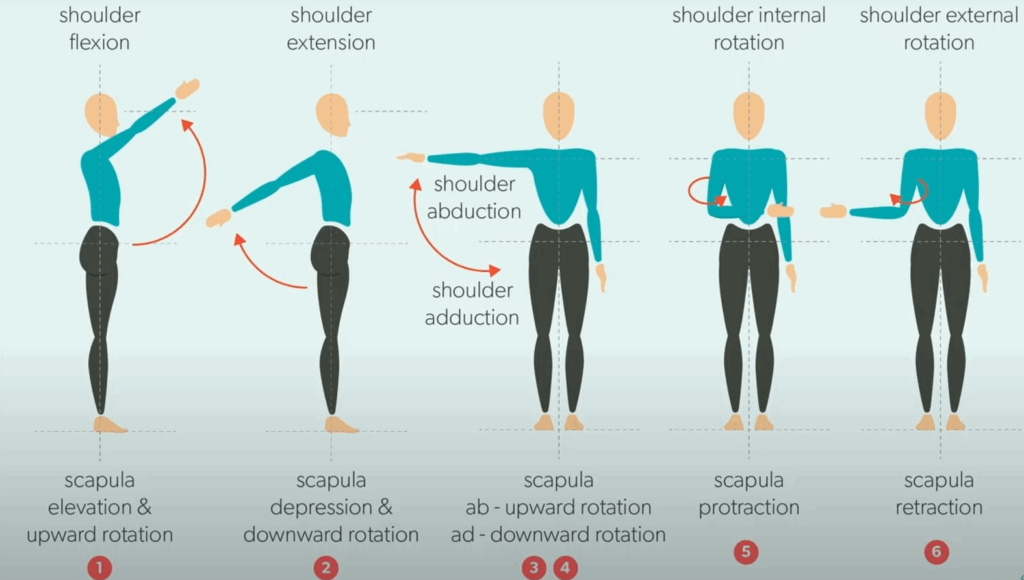
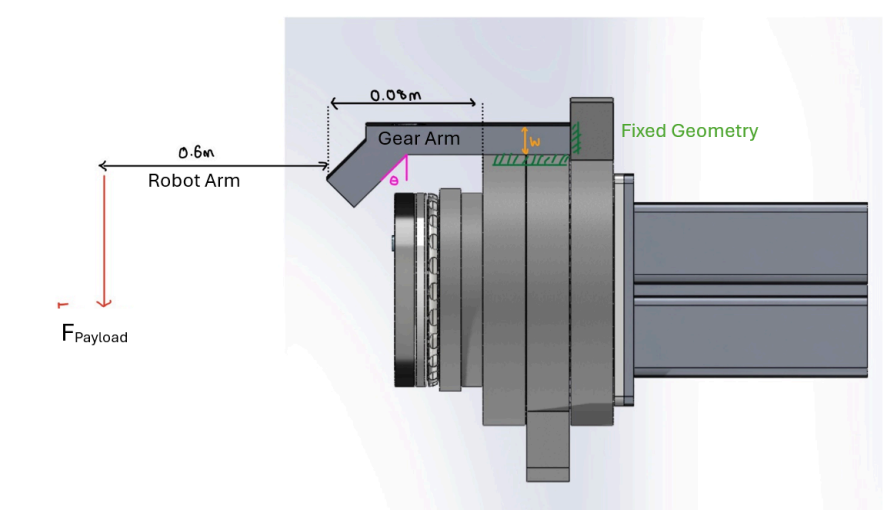
2. Abduction is the worst gravity lever for a robot arm: the proximal F/A actuators must hold the whole arm+payload at long moment arms. Humans offload this using scapular upward rotation and clavicular elevation; without those DOFs, robots either eliminate overhead payloads or run hot keeping the arm out to the side/overhead.
3. The 3rd motor pushes mass distal, raising arm inertia, which requires higher motor currents or gearboxes. A big disadvantage of abduction because motor size is a restriction, and it must carry the weight of the 3rd motor.
Why does nobody use SPMs?
1. Nasty Singularities
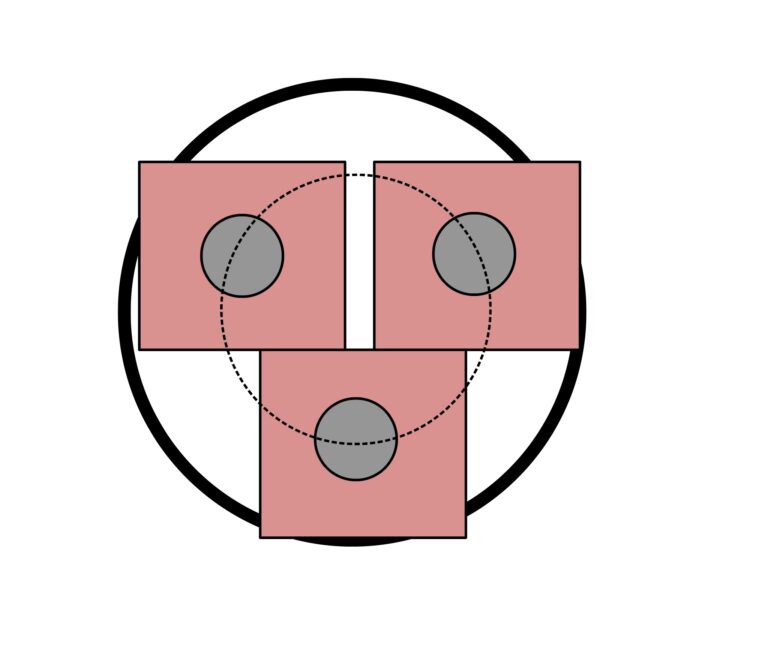
- Parallel wrists don’t just have a single, well-placed “gimbal” issue — they have Type-II (parallel) singularities on curves/surfaces inside the usable workspace. Near these, orientation accuracy collapses and required actuator forces/velocities spike
2. Smaller Workspaces
- A poor fit for a humanoid shoulder that needs big, human-like ROM for gestures, cross-body reach, and overhead tasks.
3. Control is more complex
- SPMs are closed-loop systems with nonlinear kinematics and multi-solution forward kinematics. That’s more controller logic and trickier safety margins than a simple 3-R shoulder
4. Stiffness in Arms can be weak depending on the design
What are the advantages of SPMs?
1. Low Moving Inertia
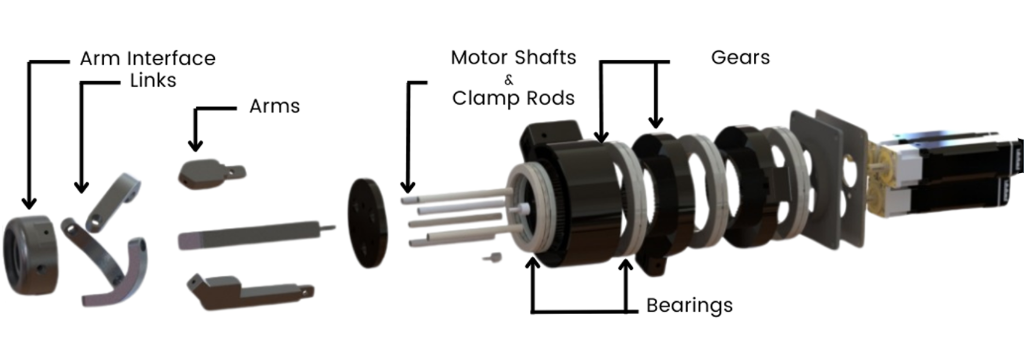
SPMs place actuators and encoders on the torso/base, leaving only short links and passive joints on the moving platform.
Lighter proximal mass = faster, lower-energy swings; less heating at the shoulder
2. High Speed
SPMs are very fast, and have precise pointing under load.
Low inertia arm, combination of 3 motor torques.
Higher structural stiffness allows for higher control gains, and reduced settling time.
3. Cleaner wiring and sensing
With sensors/encoders fixed on the base (common in SPM wrists), you avoid moving-cable stiffness and fatigue, and you simplify maintenance. It’s a small but real quality-of-life win in production robots.