Sensors and Components
Capacitive touch (I2C), ultrasonic (UART), TOF (I2C), accelerometer (I2C) motor driver (PWM), MG90 servos (PWM).
Arduino MCU is selected to control these because they demand precise, real-time I/O that Linux can’t reliably guarantee.
- MG90 servos need rock-steady 50 Hz pulses with microsecond-level stability—Linux task scheduling jitter (especially while the Pi is busy with the webcam/audio or filesystem) makes servos twitchy and motors jerky.
- Ultrasonic ranging relies on timing an echo pulse with microsecond resolution; on a Pi you’ll miss edges or block the CPU with ugly busy-wait code.
- I²C sensors (capacitive touch, ToF, accelerometer) expect deterministic polling/interrupt handling and sometimes clock-stretch; under load the Pi can delay transactions, collide with other drivers, or hang a shared bus
An MCU gives hardware PWM for servos/motor driver, input capture for ultrasonic timing, interrupt-driven UART/I²C with minimal latency, and a watchdog for safety—so sensing and control stay smooth even when the Pi is busy.
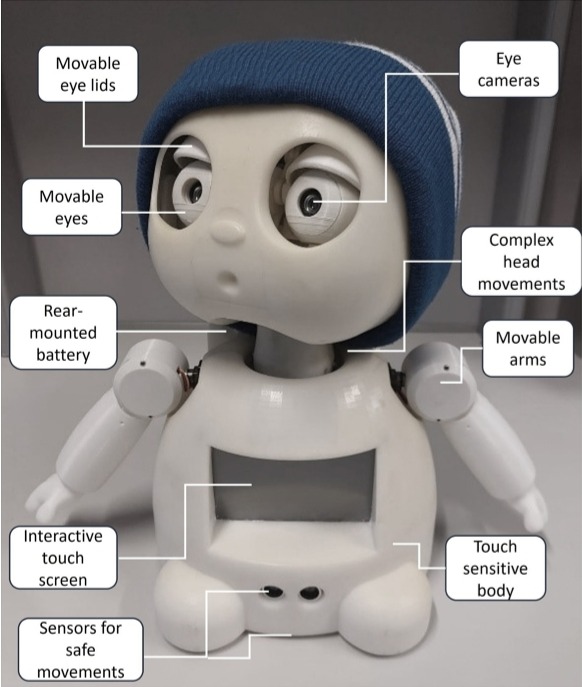
Eye cameras, microphone, speakers, touchscreen, dynamixel AX-12.
A raspberry pi is selected to use these components because Linux and has the drivers, bandwidth, and libraries these peripherals need.
Webcam: UVC cameras + OpenCV/GStreamer need USB bandwidth, large buffers, and a filesystem; most Arduinos aren’t USB hosts and don’t have the RAM/CPU to stream video.
Microphone & speakers: ALSA/PipeWire handle audio capture/playback, mixing, resampling, and USB/I²S sound cards
- Touchscreen: The Pi provides a frame buffer/GPU and input stack (DRM/KMS, evdev, Wayland/X). An Arduino can drive only very simple SPI displays at low frame rates and has no real GUI toolkit.
- AX-12 Servos: AX-12s speak half-duplex 5 V TTL serial (Protocol 1.0); the U2D2 handles the electrical/half-duplex details and presents a plain USB serial device to Linux.
If you tried to use an Arduino for these, you’d run into missing drivers/USB host support, severe RAM/CPU limits, choppy video/audio, painfully slow UI rendering, and lots of custom firmware just to match what the Pi gives you out of the box
Raspberry Pi <-> Arduino: Connected via USB, and the Arduino is treated as a peripheral.
Big Picture
Pi (Linux, Python/C++) = perception, UI, audio, high-level control, Dynamixel bus master, and the one talking to the Arduino.
Arduino (C/C++) = tight motor control + precise I/O: PWM (motors & MG90s), encoders, ultrasonic timing, I²C sensors (touch, ToF, accel), UART sensors, watchdog.
Battery Selection
- Power budget maximum of 3.63 A (5V)
- 3 A (11V)
Ovonic 50C 11.1V 2200mAh 3S LiPo Battery Pack
5 V rail: 3.63 A × 5 V ≈ 18.2 W (from a buck regulator)
11 V rail: 3 A × 11 V ≈ 33 W (direct or via a high-efficiency regulator)
Total ≈ 51 W. From an 11.1 V (3S) pack that is only ~4.6–5.2 A from the battery
Discharge capability. A 2200 mAh, 50C pack is (theoretically) good for ~110 A continuous; even assuming a much more conservative 10–20C real-world capability (22–44 A), the ~5 A average and higher motor/servo peaks are easily covered.
Battery Life
Ex calc: I5V = 0.9A, I11V = 0.2A. Runtime = battery Wh / (average power at battery (W))
Mixed driving (Pi ~1.0–1.2 A @ 5 V, two DC motors averaging ~0.6 A each @ 11 V): ≈ 19–20 W → ~60–65 min
Light cruise (Pi ~1.0 A @ 5 V, motors ~0.8 A each avg): ≈ 23 W → ~50–55 min
Aggressive (Pi ~1.2 A @ 5 V, motors ~1.0 A each avg): ≈ 29 W → ~40–45 min